


Objectives
WP3 has two specified objectives, which are strucutred according to the concepts of morphology and morphosis.
1. To construct a series of robots with novel and optimal morphology for efficient and robust locomotion and body movements in unknown environments.
2. To investigate how to enable robots to voluntarily morph (self-adjust own morphology) in order to adapt to current task demands and environments.
Year 4
In year 4, we worked on the following points:
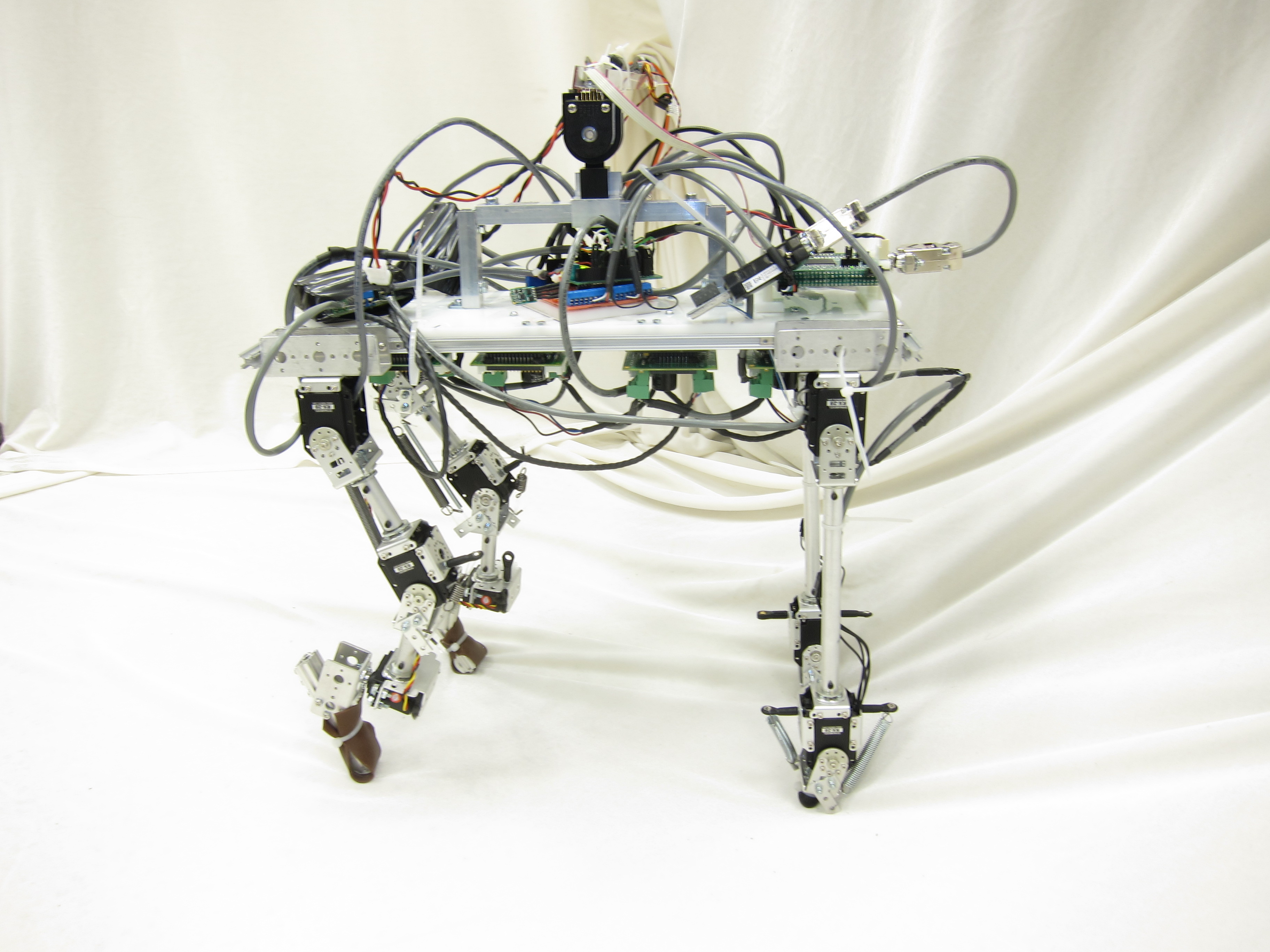
- We designed and constructed the final Locomorph robotic platform, a.k.a. the Locomorph robot.

- We investigated different leg designs (stiff/one-segmented vs. compliant/two-segmented) on the UZH2 leg with respect to energy efficiency and speed
- We demonstrated the transferability of the UZH2 leg design to a versatile, full quadrupedal robot
- We incorporated the adaptive stiffness mechanism L-MESTRAN into a robotic leg.

- We demonstrated how adapting the leg stiffness with respect to the actuating frequency can improve energy efficiency in legged 2D hopping
- We built an experimental setup that allows to control systematically the ground stiffness
- We investigated how adapting the stiffness to different compliant grounds can be used to improve energy efficiency
Year 3
During year three the existing protptypes were improved in order to be prepared for intensive experimenting, which will take place in last phase of the project. We improved the robots with respect to sturdiness, increased the robustness of the electronics, improved morphosis capabilities and handling to facilitate the scientific work.
From left to the right: UZH2, SpringyBot, UZH1, and GARP-5
In addition to these four robots, a new robot (aka the Locomorph robot) was constructed. It incorporates all knowledge and insight obtained so far in one design. It will serve in year 4 as the main experimentation platform to validate our theoretical models and to investigate different policies and control approaches to deal with morphosis.
Year 2
In the second year of Locomorph the number of robots were reduced. Based on design principles we constructed two prototype, namely UZH1 and UZH2, which incorporate the insights obtained by the experiments from year one, the results from the first robot demonstration and experiments with animals and humans. Furthermore, we constructed the SpringyBot based on the matured LocoKit (see WP2 description and pictures). We conducted a number of test with both robots on a developed semi-automatic setup for fast and reliable testing. We investigated the performance of the UZH1 in open loop, driven by a simple central pattern generator based controller. The experiments were conducted in order to estimate the performance of the robot in open loop on gait versatility, maneuverability in a number of different aspects, the performance on different terrains and the role of compliance. The obtained results provide us with insights for the design of a feedback control architecture, which is able to exploit the given morphological structure. Additionally, the results suggest new approaches to morphosis, which have to be investigated further.
The robots of year two: UZH1, UZH2 and the SpringyBot
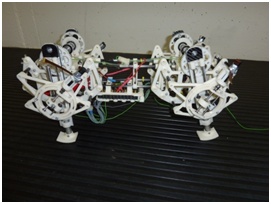
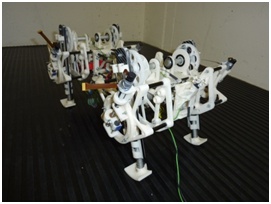
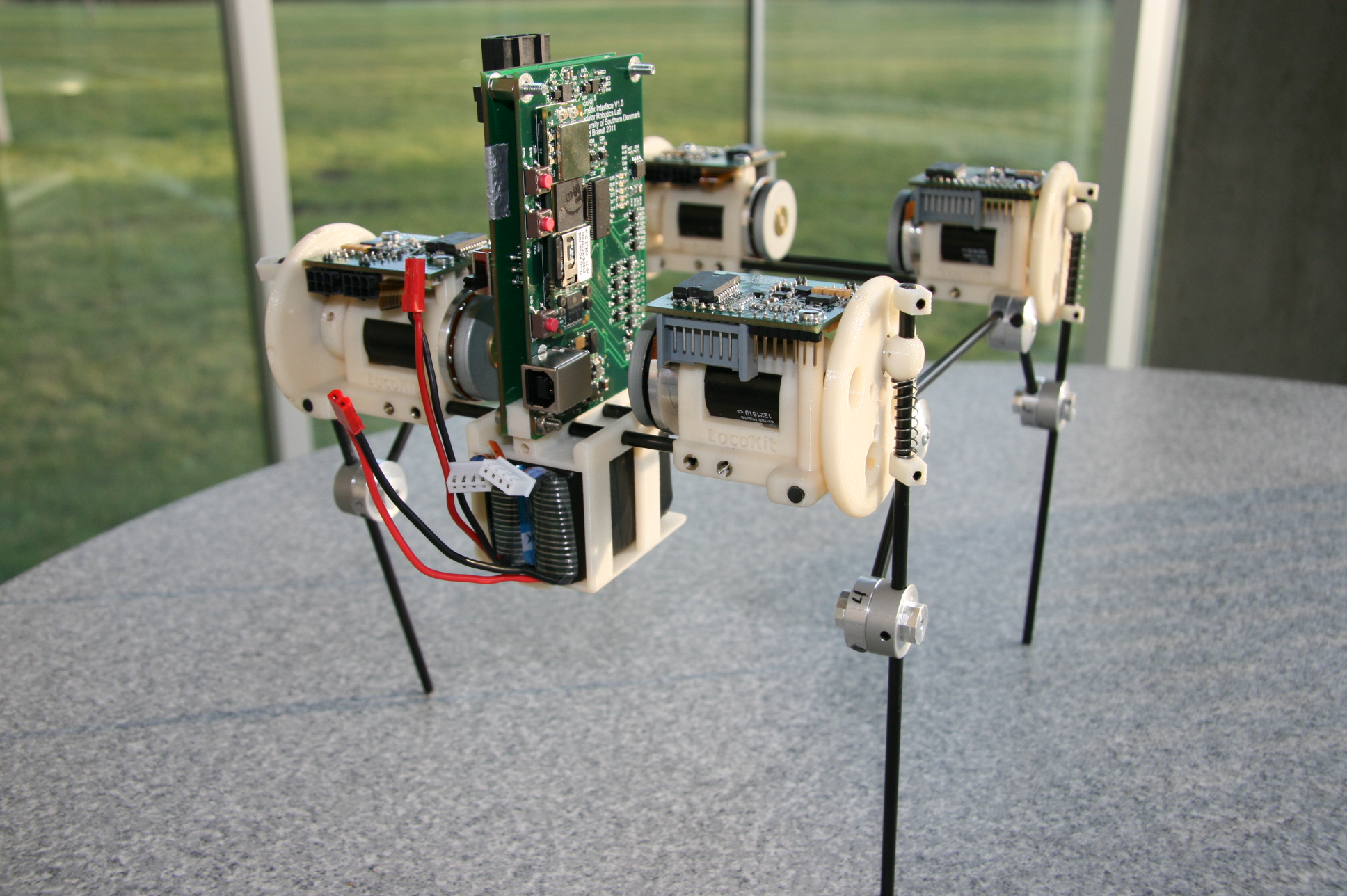
Figure 1. The UHZ1 robot
The UZH1 robots couples degrees of freedom in order to spare extra motors. Additionally, it is driven by one rotationary movement at every single leg. This approach promises energy efficiency.
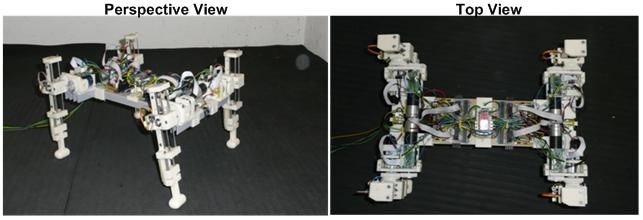
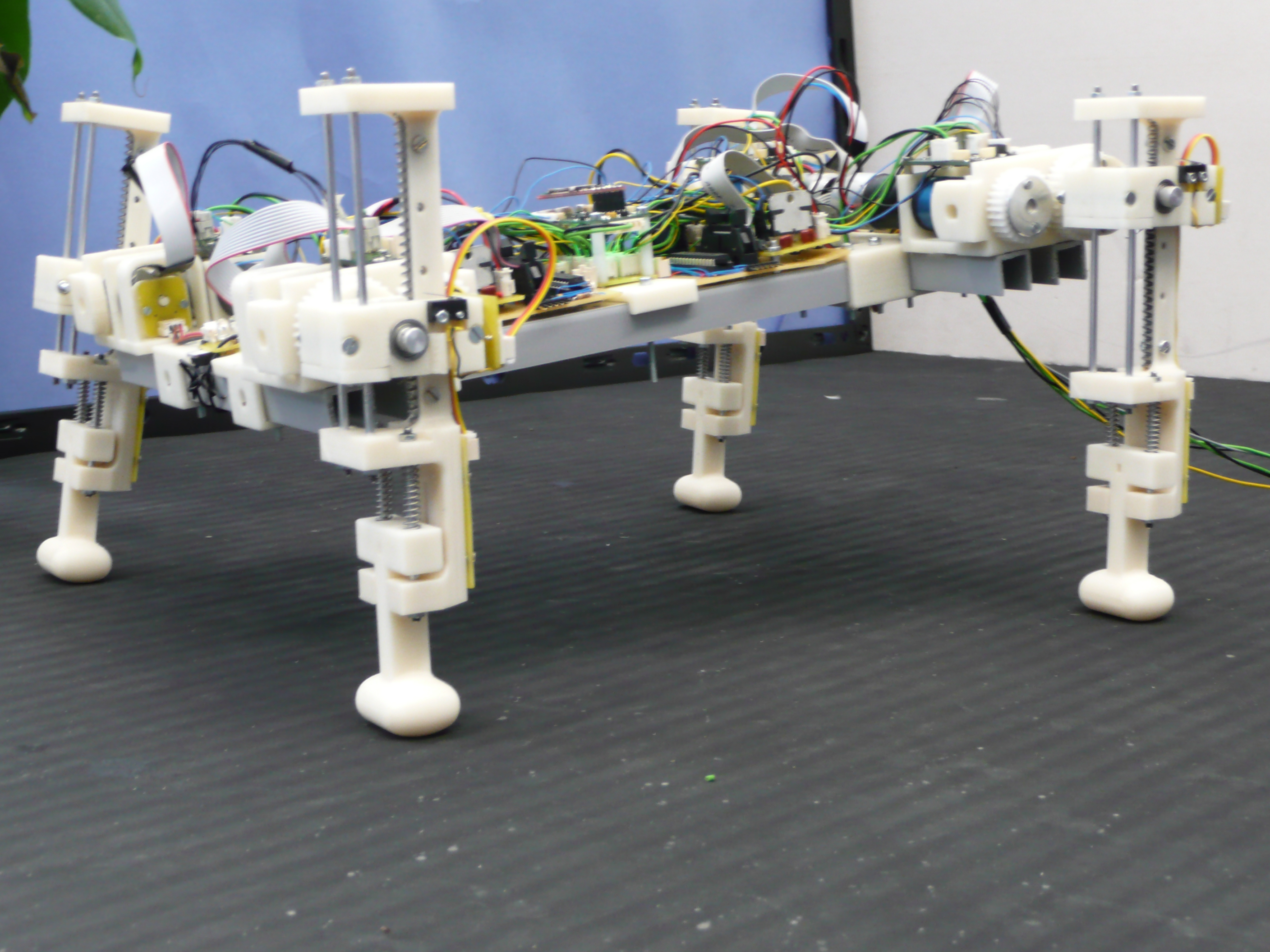
Figure 1. The UHZ2 robot
In contrast to the UZH1, this robot has two degrees of freedom per leg. This makes the robot heavier one side, but on the other side it provides more flexibility. The leg trajectories are not that constrained as it is in the case with the coupled degrees of freedom in the UZH1 robot. The designs is orientated to the SLIP model, a well established simplified model for animal locomotion.
Year 1
During the first year, we have built a series of whole robots to explore one or more morpholigical factors. We expected that these initial explorations would provide useful insights for the next phase.
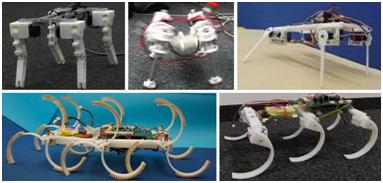
Figure 4. A set of whole robots which were constructed in the period of May - Dec 2009.
In the next phase we constructed a set of robots using modular heterogeneous components (developed in WP 2), which enabled us to explore a larger set of morphological parameters.
- Figure 5. Some examples of robots which were constructed using various heterogeneous modules.

