


Variable stiffness track

An adjustable leg stiffness hopping robot
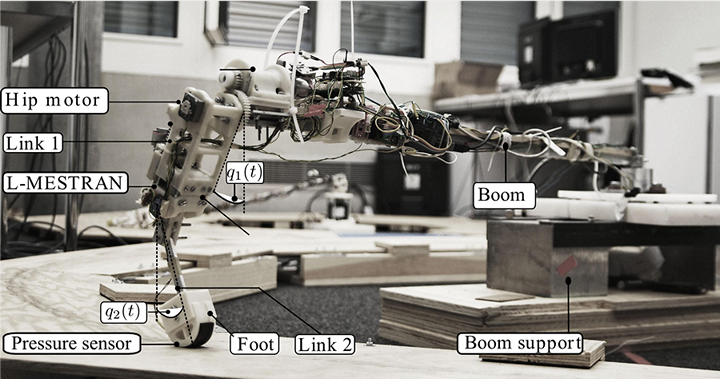
Experimental Setup for UZH1 robot:












UZH-1:






















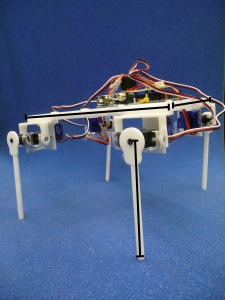
UZH-2:

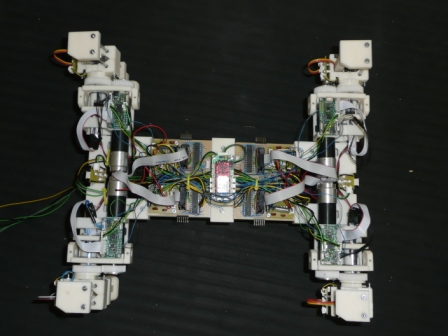
Modular Robot:








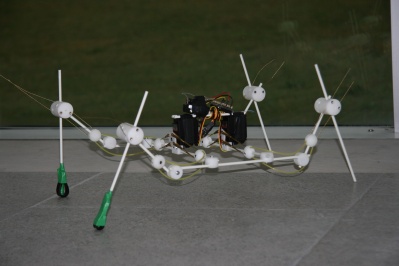
AngHi:











Kitty:










LocoKit
Robotic Kit version 0:































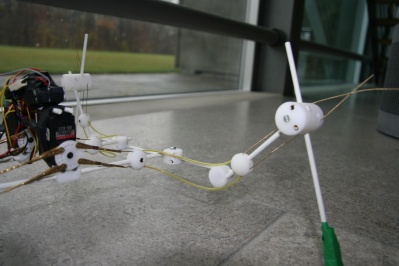

Different robots, build from LocoKit version 1:

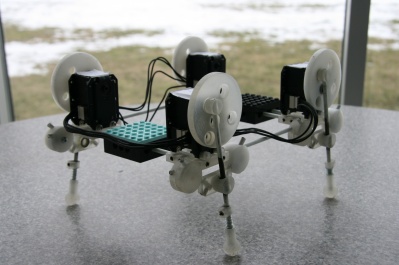








SpringyBot version 2, build from LocoKit version 2:














SpringyBot version 3, build from LocoKit version 2:




















LocoKit components version 2:






















LocoKit electronics version 1:








LocoKit electronics version 2:






Consortium meetings
Kick off meeting in Zürich (Feb 2009):
http://www.ee.ryerson.ca/~jasmith/locomorph/photos/kickoff_feb2009/

